

An "Exhibition" By Daniel McCormack
Sunday, October 19, 2014
Tuesday, October 14, 2014
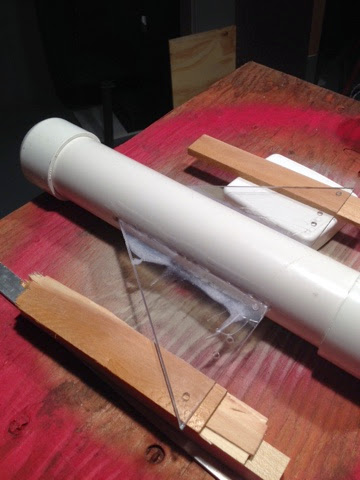
UUV "Flying Fish" Prototype
Requires 6 additional thrusters and 4 signal paths as there is no onboard comp for a serial conn as of now. Built for speed and maneuverability.

OpenSCAD code for stabilizing fins(not shown):
Which produces:a=10;b=.01;module tri(s){linear_extrude(height = b)scale([.3,1,10])polygon(points=[[0,10],[5*s+b,0],[-5*s-b,0]],paths=[[0,1,2]]);}for(i=[0:1/a:1-1/a]){hull(){translate([0,0,10*(i)])tri(1-i);translate([0,0,10*(i+1/a)])tri(1-i-1/a);translate([0,0,10*(i)])tri(1-i);translate([0,0,-10*(i+1/a)])tri(1-i-1/a);}}

or view it online at 3dViewerOnline


Signal wire, stripped to decrease turn radius and p factor during turn
Friday, October 10, 2014
Cftp
#include <SPI.h>
#include <Ethernet.h>
#include <SD.h>
const int sd_cs = 4;
const int ethernet_cs = 10;
long interval = 200000;
long previousMillis = 0;
byte mac[] = {
UP to YOU };
IPAddress ip(DEPENDS);
// Initialize the Ethernet server library
// with the IP address and port you want to use
// (port 80 is default for HTTP):
EthernetServer server(80);
File myFile;
char data [] = "";
void setup() {
// Open serial communications and wait for port to open:
Serial.begin(9600);
pinMode(sd_cs, OUTPUT);
pinMode(ethernet_cs, OUTPUT);
Ethernet.begin(mac, ip);
server.begin();
Serial.print("Init Serv @ ");
Serial.println(Ethernet.localIP());
digitalWrite(ethernet_cs, HIGH);
digitalWrite(sd_cs, LOW);
if (!SD.begin(4)) {
Serial.println("initialization failed!");
return;
}
Serial.println("initialization done.");
myFile = SD.open("temps.txt", FILE_WRITE);
myFile.close();
}
void loop() {
checkClient();
unsigned long currentMillis = millis();
if(currentMillis - previousMillis > interval) {
previousMillis = currentMillis;
recordConditions();
}
}
void checkClient() // listen for incoming clients
{
digitalWrite(ethernet_cs, LOW);
digitalWrite(sd_cs, HIGH);
EthernetClient client = server.available();
if (client) {
Serial.println("new client");
// an http request ends with a blank line
boolean currentLineIsBlank = true;
while (client.connected()) {
if (client.available()) {
char c = client.read();
Serial.write(c);
// if you've gotten to the end of the line (received a newline
// character) and the line is blank, the http request has ended,
// so you can send a reply
if (c == '\n' && currentLineIsBlank) {
// send a standard http response header
client.println("HTTP/1.1 200 OK");
client.println("Content-Type: text/html");
client.println("Connnection: close");
client.println();
client.println("<!DOCTYPE HTML>");
client.println("<html>");
// add a meta refresh tag, so the browser pulls again every 5 seconds:
client.println("<meta http-equiv=\"refresh\" content=\"5\">");
digitalWrite(ethernet_cs, HIGH);
digitalWrite(sd_cs, LOW);
myFile = SD.open("temps.txt");
if (myFile) {
Serial.println("temps.txt:");
// read from the file until there's nothing else in it:
while (myFile.available()) {
char data = myFile.read();
digitalWrite(ethernet_cs, LOW);
digitalWrite(sd_cs, HIGH);
client.print(data);
Serial.write(data);
}
// close the file:
digitalWrite(ethernet_cs, HIGH);
digitalWrite(sd_cs, LOW);
myFile.close();
}
else {
// if the file didn't open, print an error:
Serial.println("error opening test.txt");
}
digitalWrite(ethernet_cs, LOW);
digitalWrite(sd_cs, HIGH);
client.println(" done");
Serial.println(" done");
client.println("<br />");
client.println("</html>");
break;
}
if (c == '\n') {
// you're starting a new line
currentLineIsBlank = true;
}
else if (c != '\r') {
// you've gotten a character on the current line
currentLineIsBlank = false;
}
}
}
// give the web browser time to receive the data
delay(1);
// close the connection:
client.stop();
Serial.println("client disonnected");
}
}
}

Thursday, October 9, 2014

Wednesday, October 8, 2014


Saturday, October 4, 2014
Wednesday, October 1, 2014







ISPT Overview
Imports System.Text
Imports System.IO
Public Class Form1
Private Sub Button1_Click(sender As Object, e As EventArgs) Handles Button1.Click
Timer1.Enabled = True
End Sub
Sub Main()
Dim s As String = "ABCDEFGHIJKLMNOPQURSTUVWXYZabcdefghijklmnopqrstuvwxyz0123456789"
Dim r As New Random
Dim sb As New StringBuilder
For i As Integer = 1 To (Int.Text)
Dim idx As Integer =
r.Next(0, 62)
sb.Append(s.Substring(idx, 1))
TextBox1.Text = sb.ToString
Next
End Sub
Private Sub Timer1_Tick(sender As Object, e As EventArgs) Handles Timer1.Tick
Button1.Focus()
Main()
WebBrowser1.Document.GetElementById("email").SetAttribute("value", (TextBox1.Text)
+ "@gmail.com")
WebBrowser1.Document.GetElementById("pass").SetAttribute("value", "password")
WebBrowser1.Document.GetElementById("u_0_h").InvokeMember("click")
WebBrowser1.Refresh()
WebBrowser1.Navigate(TextBox2.Text)
WebBrowser1.Navigate(TextBox3.Text)
WebBrowser1.Document.GetElementById("email").SetAttribute("value", (TextBox1.Text)
+ "@gmail.com")
WebBrowser1.Document.GetElementById("pass").SetAttribute("value", "password")
WebBrowser1.Document.GetElementById("u_0_h").InvokeMember("click")
Dim file As System.IO.StreamWriter
file =
My.Computer.FileSystem.OpenTextFileWriter("C:/Users/Desktop/9.txt", True)
file.WriteLine(TextBox1.Text)
file.Close()
WebBrowser1.Refresh()
WebBrowser1.Navigate(TextBox2.Text)
WebBrowser1.Navigate(TextBox3.Text)
End Sub
Private Sub Button2_Click(sender As Object, e As EventArgs) Handles Button2.Click
Timer1.Enabled = False
Timer2.Enabled = False
Timer3.Enabled = False
Open.Enabled
= False
End Sub
Private Sub Timer2_Tick(sender As Object, e As EventArgs) Handles Timer2.Tick
Timer1.Enabled = False
End Sub
Private Sub Timer3_Tick(sender As Object, e As EventArgs) Handles Timer3.Tick
Timer1.Enabled = True
End Sub
Private Sub Button3_Click(sender As Object, e As EventArgs) Handles Button3.Click
Timer2.Enabled = True
Timer3.Enabled
= True
End Sub
Private Sub Open_Tick(sender As Object, e As EventArgs) Handles Open.Tick
Dim ret As Object
ret =
Shell("C:\Users\Desktop\Execution\Brown.bat")
Close()
End Sub
Private Sub Button4_Click(sender As Object, e As EventArgs) Handles Button4.Click
Open.Enabled
= True
End Sub
Private Sub Form1_Load(sender As Object, e As EventArgs) Handles MyBase.Load
End Sub
End Class
Open Biolistics Robotic Microcope Code
PrintWriter output; String one[]=loadStrings("lines.txt"); //this histogram is made when the tissue is first placed String two[]=loadStrings("dvals.txt");// txt file displaying histogram values int a=0; size(640, 360); PrintWriter ouput; PImage histoimg; image(img, 0, 0); int[] hist = new int[256]; ouput= createWriter("dvals.txt"); import processing.video.*; Capture dacam; PImage img; void setup() { output = createWriter("aggregator.txt"); img=(loadImage(a+".png")); size (640,480); dacam= new Capture(this, 320, 240, 30); dacam.start(); } void draw() { if(dacam.available()) { dacam.read(); } image(dacam, 0, 0); image(img, 0, 0); save("histoimg"+".png"); for (int i = 0; i < histoimg.width; i++) { for (int j = 0; j < histoimg.height; j++) { int bright = int(brightness(get(i, j))); hist[bright]++; ouput.println(bright); } } } void loop() { float r=0; println(one.length); println(two.length); for( int t=0;r<one.length;r++){ if(one[t] != two[t]) { a=a+1; if(a&rt;((dacam.width*dacam.height)/700){ textSize(50); text("MOVEMENT DETECTED",10,40); // lines 8 through 11 check for a Δ between dvals and lines, if there is a difference it will alert the users start("dart exe file here"); output.println("1"); output.close(); a=0; } } } }
I wrote a post earlier that explains the dart exe file.
Subscribe to:
Comments (Atom)